Batch Normalization
Understanding Batch Normalization with Codes Explained

Understanding Batch Normalization with Codes Explained
What is Batch Normalization?
Normalization means normalizing the data dimensions so that they are of approximately the same scale. Batch normalization is a technique for training very deep neural networks that normalizes the contributions to a layer for every mini-batch. Batch Norm is an essential part of the most of deep learning implementation.
Batch Normalization is normalizing the hidden units activation values so that the distribution of these activations remains same during training. Batch Normalization has the impact of settling the learning process and drastically decreasing the number of training epochs required to train deep neural networks.
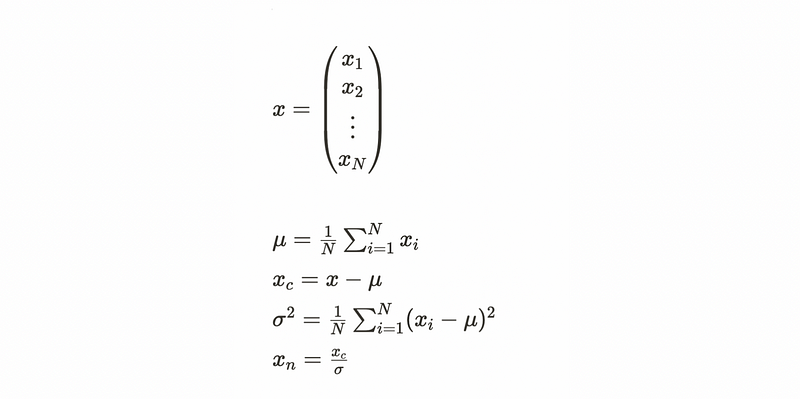
We will assume that X is of size [N x D]. N is the number of data and D is their dimensionality. To get variance, we need to subtract the mean across every individual feature in the data.
Gamma and Beta are learned along with the other parameters of the network. There would be update rule for gamma and beta and this update rule would depend upon the derivative of the loss function with respect to gamma and beta.
Advantages of Batch Normalization
Here are some benefits of Batch Normalization:
- The model is less delicate to hyperparameter tuning. That is, though bigger learning rates prompted non-valuable models already, bigger LRs are satisfactory at this point.
- Shrinks internal covariant shift.
- Diminishes the reliance of gradients on the scale of the parameters or their underlying values.
- Weight initialization is a smidgen less significant at this point.
- Dropout can be evacuated for regularization.
Batch Normalization Layer
Batch Normalization normalizes batch data (output of Affine or Conv) before activation. Batch Normalization Layer is consist of forward pass and backward pass. The codes are from the book ‘Deep Learning From Scratch’, published in September 2019.
Initialization of Batch Normalization Layer
Temporary variables in forward() and backward() defined in the initialization part.
class BatchNormalization:def __init__(self, gamma, beta, momentum=0.9, running_mean=None, running_var=None):
self.gamma = gamma # scale after normalization
self.beta = beta # shift after normalization
self.momentum = momentum # smoothing factor of EMA, momentum * newest value
# temporary variables in forward()
self.input_shape = None # Conv:4dim, Affine:2dim# mean and variance for test session
self.running_mean = running_mean
self.running_var = running_var
# temporary variables in backward()
self.batch_size = None
self.xc = None # centered batch data
self.std = None
self.dgamma = None
self.dbeta = NoneForward Pass of Batch Normalization Layer
Forward Pass has two parts. The second one(__forward) is the actual forward process of batch normalization.
def forward(self, x, train_flg=True): #train_flg=False when testing
self.input_shape = x.shape # hold original shape here
if x.ndim != 2: # If the previous layer is not Affine(ndim=2)
N, C, H, W = x.shape
x = x.reshape(N, -1)
out = self.__forward(x, train_flg)
return out.reshape(*self.input_shape) # recover the shape of x after normalizationdef __forward(self, x, train_flg):
if self.running_mean is None:
N, D = x.shape
# In the first iteration,setting moving average and var as 0.
self.running_mean = np.zeros(D)
self.running_var = np.zeros(D)
if train_flg: # When training
mu = x.mean(axis=0) # find mean for each column
xc = x - mu # mean subtraction
var = np.mean(xc**2, axis=0)
std = np.sqrt(var + 10e-7) # + 10e-7 protects the vale from 0
xn = xc / std #normalize
self.batch_size = x.shape[0]
self.xc = xc
self.xn = xn
self.std = std
self.running_mean = self.momentum * self.running_mean + (1-self.momentum) * mu
self.running_var = self.momentum * self.running_var + (1-self.momentum) * var
else: # When testing
xc = x - self.running_mean
xn = xc / ((np.sqrt(self.running_var + 10e-7)))
out = self.gamma * xn + self.beta # gamma and beta are defined after training
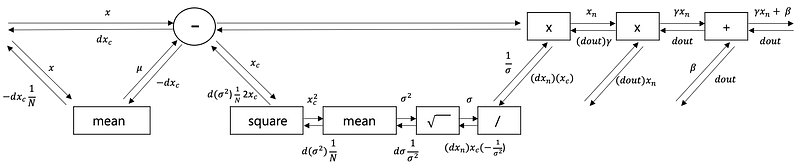
return outBackward Pass of Batch Normalization Layer
This process is to find dgamma and dbeta, which is used to update beta and gamma.
def backward(self, dout):
if dout.ndim != 2:
N, C, H, W = dout.shape
dout = dout.reshape(N, -1)dx = self.__backward(dout)dx = dx.reshape(*self.input_shape)
return dxdef __backward(self, dout):
dbeta = dout.sum(axis=0)
dgamma = np.sum(self.xn * dout, axis=0) # Hadamard product
dxn = self.gamma * dout
dxc = dxn / self.std
dstd = -np.sum((dxn * self.xc) / (self.std * self.std), axis=0)
dvar = 0.5 * dstd / self.std
dxc += (2.0 / self.batch_size) * self.xc * dvar
dmu = np.sum(dxc, axis=0)
dx = dxc - dmu / self.batch_size
self.dgamma = dgamma
self.dbeta = dbeta
return dxBatch Norm is a very useful layer. If you are interested in Deep Learning, you will for sure have to get familiar with this method. I hope this post gives you a good understanding of how Batch Norm works.